This explanation about CCC is linked to Luc Armant report "what do we want ?" Check it here !
Current situation:
In order to design a competitive wing with current scoring system and current CCC rules, it is necessary to use a profile with marginal pitch stability, which translates into low resistance to collapse at full speed.
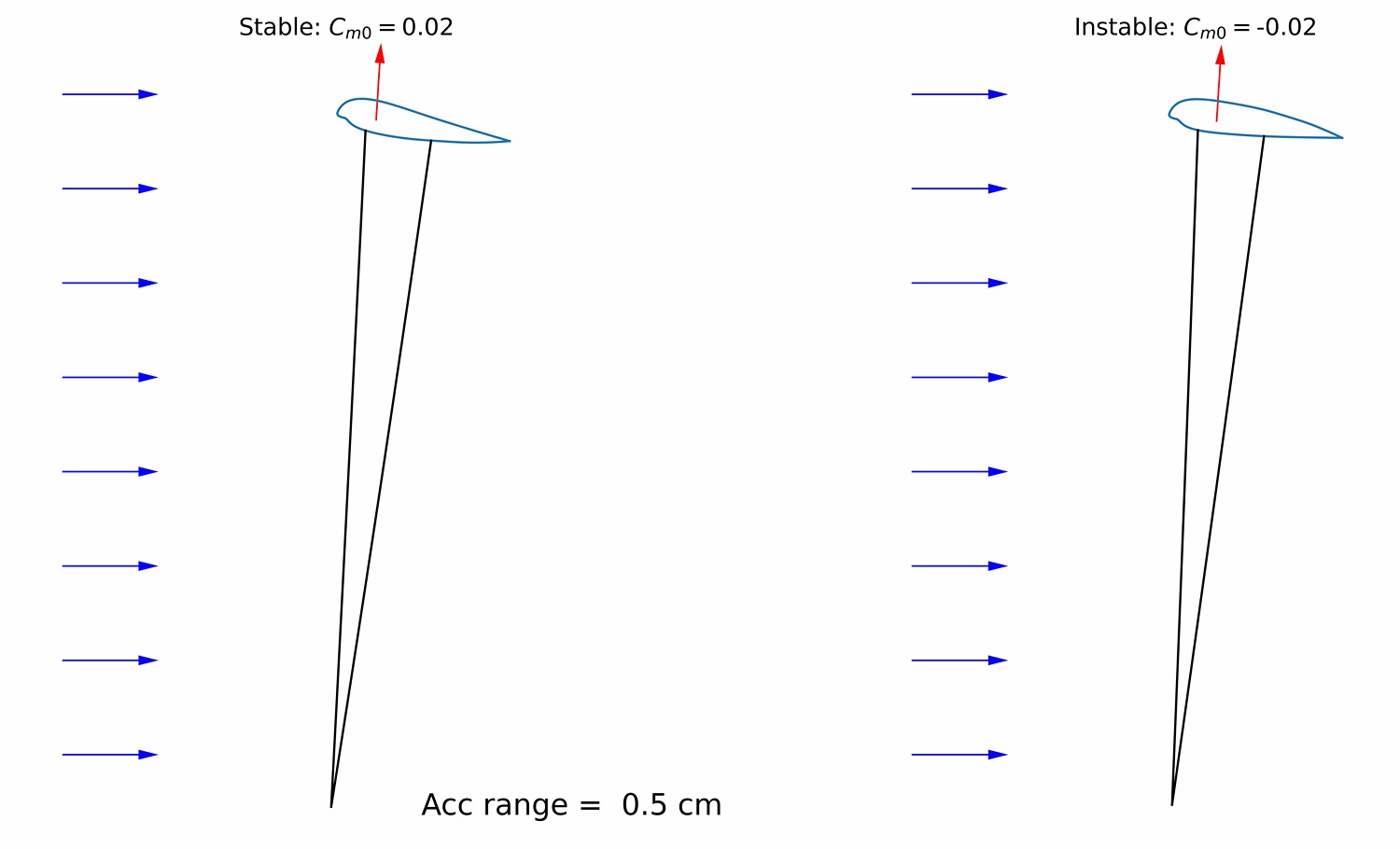
During 5 years of working hard for the Enzo4 project, we have done plenty of measurements and simulation. For a wing of around 7 to 8 in Aspect Ratio, we found out that the velocity you get out of a given speed range is mostly dependent upon the Cm0 of your profile. This number qualifies the pitch stability, bigger values = more stable profile. Also bigger number = force resultant more in the front of the profile which makes the A more loaded and the B less loaded.
Here is an animation of a simulation done including line bending from air drag and line elasticity.
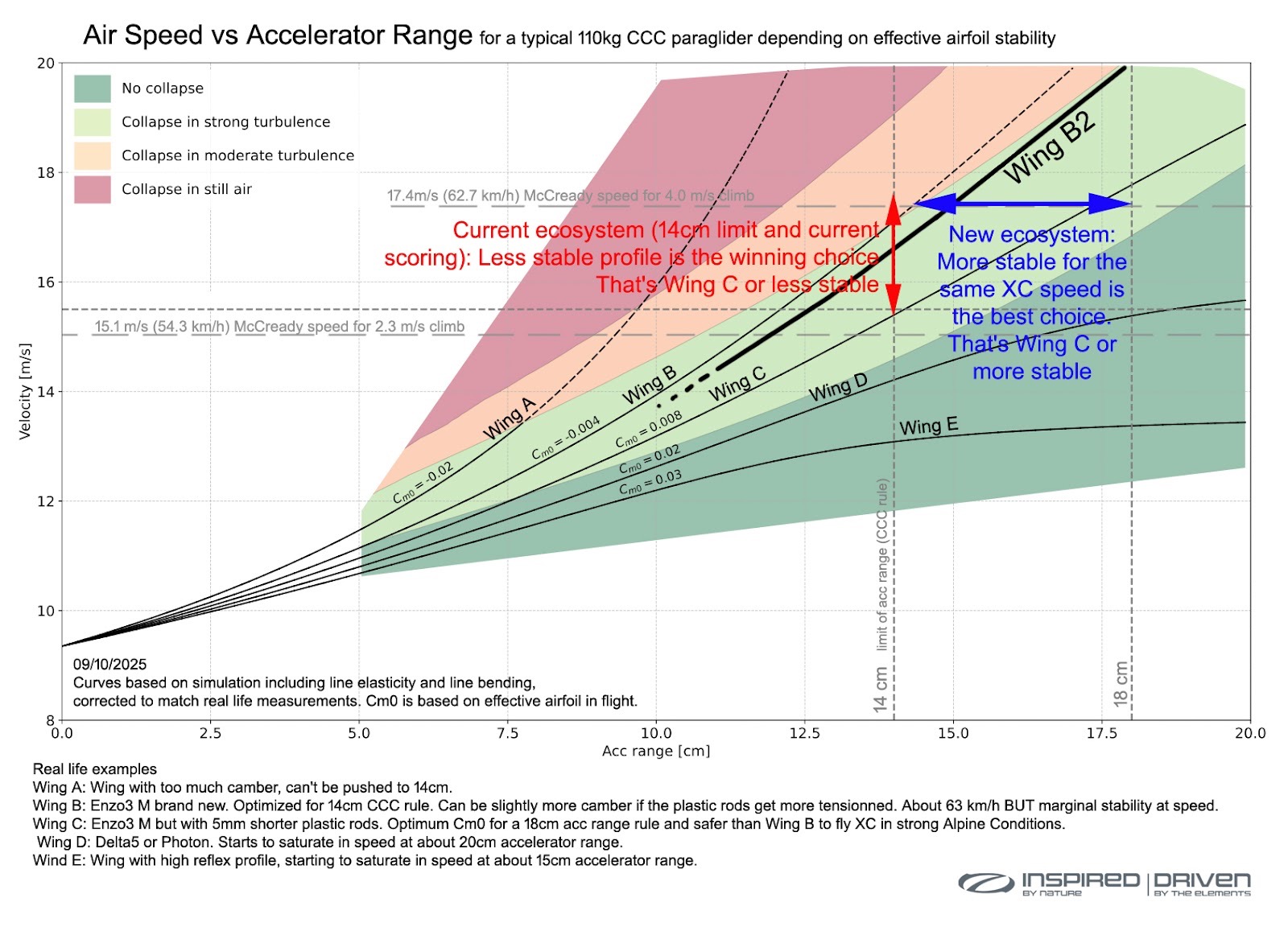
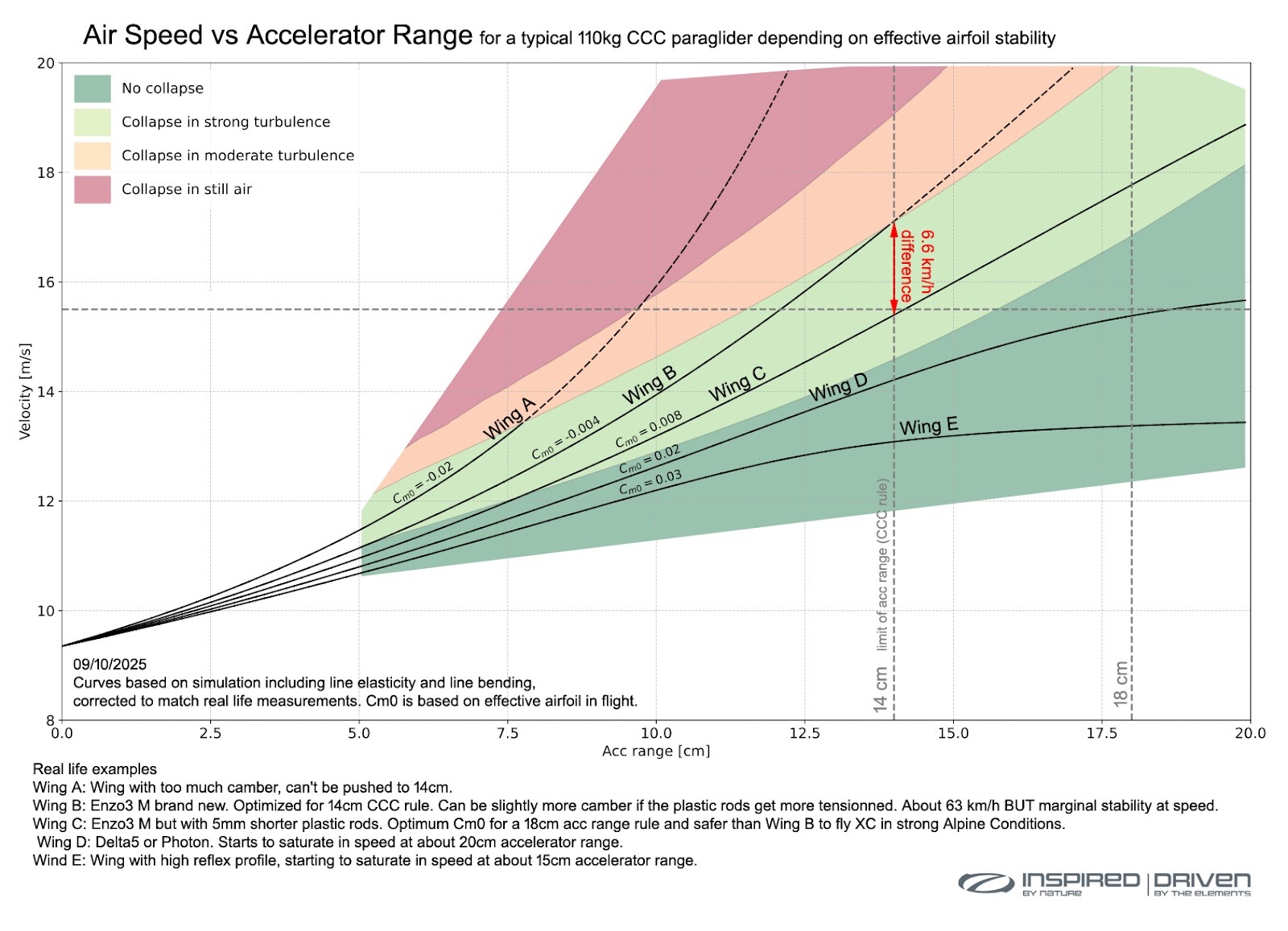
Coming from a given trim speed that we like for thermaling, for several Cm0, using the simulation we can plot the air speed obtained by a given quantity of speed system applied. By speed system quantity, I mean how much you pull the A down. Note that we have adjusted the parameters of the simulation to make sure it matches well with all the speed measurements we done on real wing with real profiles. The rating regarding how easy the glider can collapse is done from real experience.
Here is how it looks like:
The CCC rules says that you can only pull 14cm of speed system. It’s limited by a strap anyway. You can make a stable CCC but it will be slower. From the way that competition are actually scored it is very important for your wing to have a very good maximum speed within your 14cm. This because task are often finished with a glide to goal with excess altitude, so the only thing that matters is how many airspeed you can get. You can gain from 10 to 15 points for each minute in front of another pilot, in competitions where the final result will be driven by few points difference.
Note that the difference in air speed can be massive from very little difference in the profile. For example, an Enzo3 with good plastic tension coming from the factory will go at 61 km/h (IAS) while it will only go at 55 km/h when the plastic rods are loose (5mm cut off). See in the graph below. The pilots and the designers are pushed to use unstable wing profile. Enzo3 pilots are constantly facing a difficult dilemma of having long plastic, faster wing but collapsing on the bar or trimming their plastics to be safer but not as fast.
CCC update:
Now if you limit the speed system to 18 cm instead of 14 cm but you keep the same scoring, very probably, the winning wing will be something more stable than current CCC (for the same speed) but still dangerously fast and at the limit of stability at full speed. That would be wing B2 on the graph below, and that would certainly not be safe.
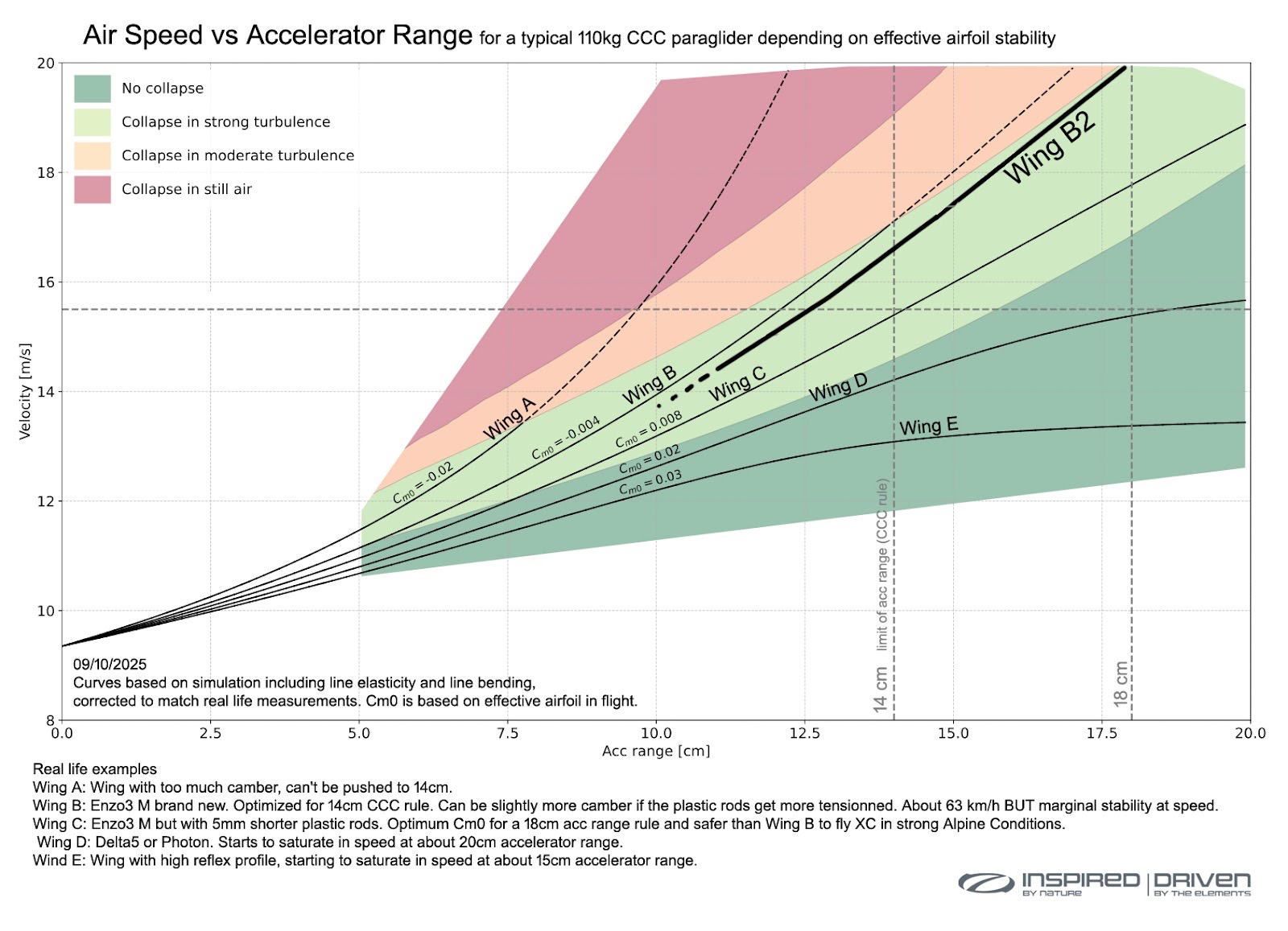
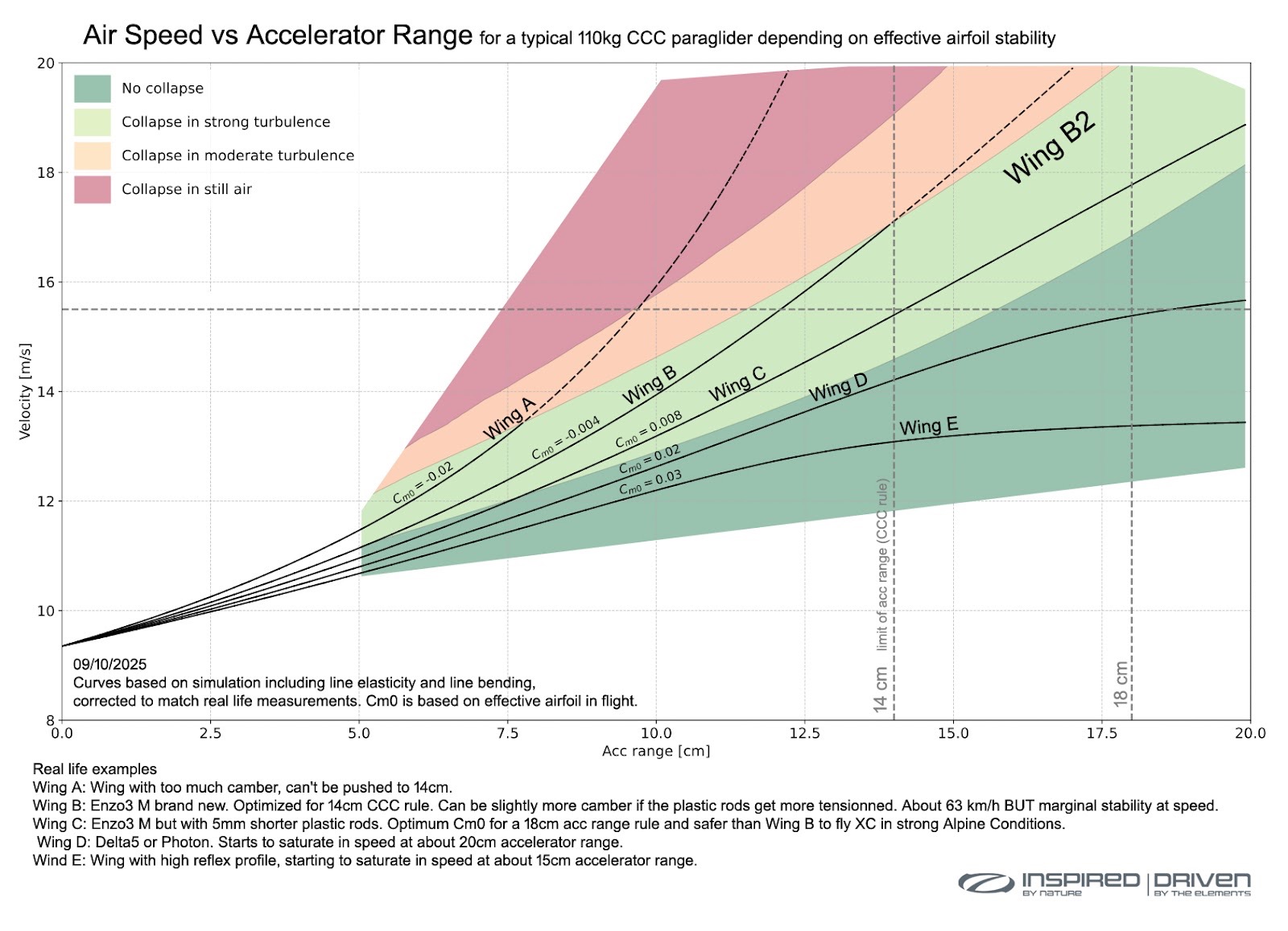
However, if there is no more incentive for high speed in final glide, the only important design factor is to reach the most frequent McCready speed during the task while keeping the wing open. Glider solidity will become key for the designer but also for the pilot.
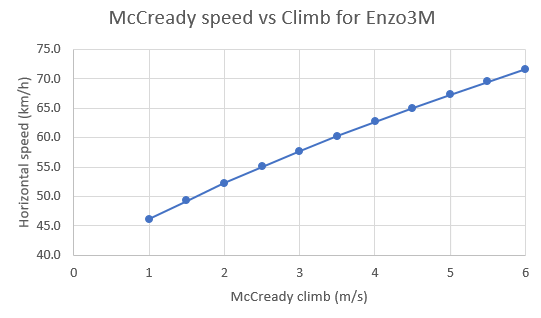
Up to about 4m/s of average thermal climb, which is what we get 99% of the time in competition, the McCready speed remains below the maximum speed we can currently have with a CCC.
However, one could ask:
When, very exceptionally, we would have a McCready of +6m/s, is suddenly the better design becoming Wing B2 again, despite the fact that there is no more incentive for max speed on final glide ?
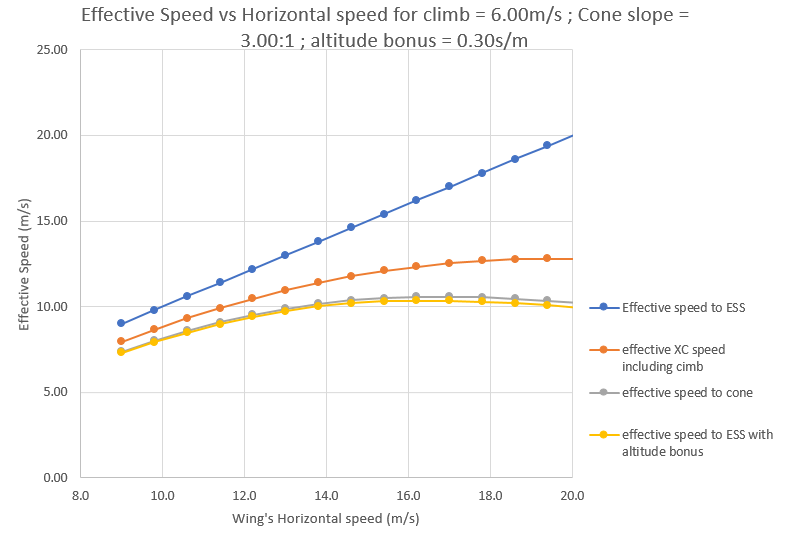
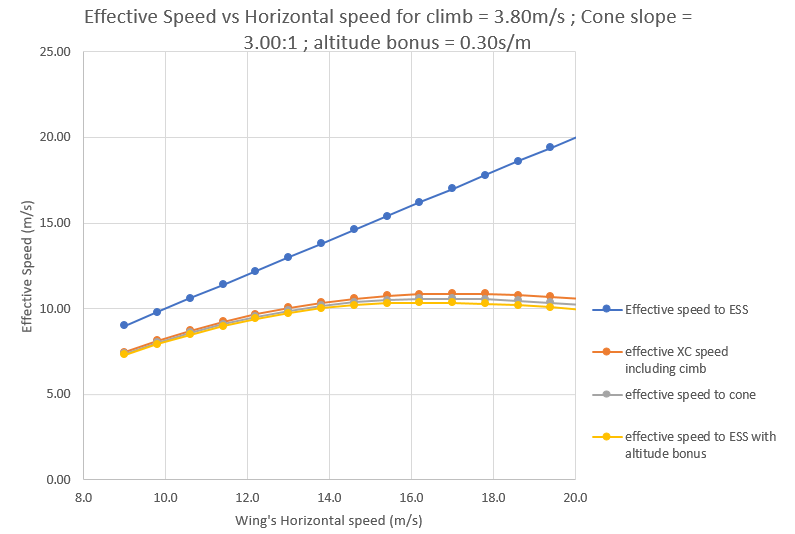
The answer is based on the fact that the event is too rare to influence the design and on the fact that the Effective XC speed vs Horizontal speed curve is very flat around the McCready speed. See orange curve in the graph below:
Example:
The best pilot will fly to the next big thermal at McCready speed. It's a 6m/s average thermal. Extremely rare during a task, even in strong alpine conditions, but sometimes happening. The MacCready for that thermal is 71 km/h (19.9m/s). It might be possible to reach such speed with wing B2 if the turbulence is low enough. However, that wing will probably still be slower than Wing C in active air, just because the pilot on Wing C does not have to control as much to not collapse. But let's imagine that the pilot on wing B2 is extremely imprudent and manages once to overpass Wing C. If he does so at 19.9m/s and if the Wing C is only at 17.0m/s (current E3 top speed), and all that during a transition of 5 km, wing B2 will gain only 9 seconds over Wing C. Something that he will certainly lose immediately at the tiniest mistake while entering the thermal first.
I think you can understand that the manufacturer will not go in the direction of Wing B2 design. First because the hypothesis is extremely rare, second because there is no real gain in this hypothesis and finally because in reality, in most situations during a task, Wing B2 will lose or because of collapses or because of poorer speed (required to keep the glider opened). So a manufacturer will always prefer to design wing C as it will win competition AND it will have less accidents from collapse during the task.
If it was a final glide with classic ESS, during a 5km glide, wing B2 at 19.9 m/s would gain 43 seconds. And this gain would be guaranteed as there is no much risk to not center correctly the thermal in the first round. About 10 points in the box for Wing B2. That could force a manufacturer toward an unsafe design choice.
I suppose you understand why the gain flying full speed toward the extreme thermal was only 9 s (most probably lost in the first round) while racing full speed toward ESS, the gain is a massive 43 s guaranteed. When flying toward the thermal, you are faster but you still arrive lower, so your average XC speed (including the thermal) is not that much different. For picturising it, gliding toward a 6 m/s thermal you'd be making the same race as gliding toward a 1:2 CESS slope. For the same reason, flying toward CESS with a slower speed than optimum makes only a very small handicap. See again the curves of the graph above.
Other questions:
But in current task, how do you explain that we often fly full speed while the McCready speed seems to be lower ?
We sometimes think that we are flying full speed during glides while we are not really. Having some hand weight on the B handles helps for stability but removes about 5km/h, so we are "only" at 56km/h. That's what we most do in "classic" XC conditions, and that's corresponding to McCready of +2.7m/s average thermal.
But effectively, we also often fly faster than McCready. And it's a mistake we can't easily have feedback about, also because the difference it makes in XC average speed is super small. Numerical example, still on a 5 km glide: if the McCready climb is +2.7 m/s, the optimum McCready speed is 56 km/h. Now if you fly at 61km/h instead (like you'd do on final glide, no pressure on B handle), you'll arrive in the thermal zone 27 seconds sooner (but lower) and you'll be theoretically handicapped by McCready theory by only 5 seconds (a third of a circle in a thermal). If you are inside the leading gaggle, which is mostly made out of good climbers, you may beat the second slower group due a good search move and you could be biased to think that you did so thanks to your higher gliding speed, while it was just thanks to a better climbing team work. In other worlds, when everyone is flying too fast, the climbing team work can sometimes make it less efficient to glide alone at optimum speed.
In many situations, the slower second group was slightly behind anyway, so you'll not receive the feedback for the 5 seconds penalty of overpassing the McCready speed.
Note that all speeds are expressed in IAS. So for example if you are at 1000m altitude, you can add almost 4% to these values.
I agree we can't rely only on theory about this sort of thing. But the reality is also telling the same thing. The reality of what we observe when doing XC amongst friends. But also the reality during competition. It often happens that there is someone with a faster glider than the others. Sometimes it has been the model which was way faster than the others; remember. In these cases, the difference was never really made during the task, it was gained during the final glide to ESS.
Final sprint award removal.
You can understand from the graph below that there is a strong discontinuiting while racing when it comes to final glide. Before the final glide, we are racing XC based on thermal and transition. It’s not about who’s flying the fastest through the air, it’s about who’s flying averagely the fastest including thermaling, finding lines, strategy, etc. But when it comes to final glide with excess altitude (which is very often), it becomes trivial. Horizontal speed equals Effective Speed.
Removing the final sprint award can be made in several ways.
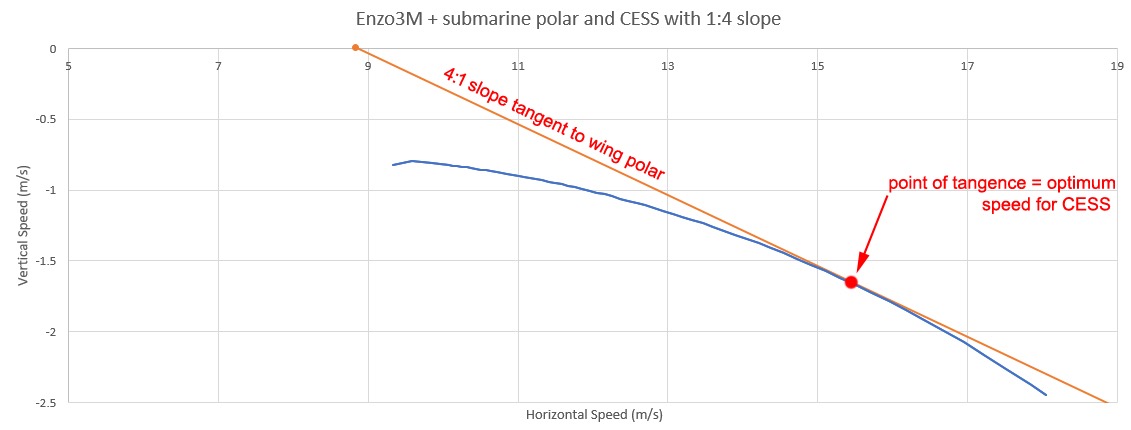
Conical End of Speed Section.
For those who don't know about CESS, we made a shitty video in the past which can still barely be watched here, but it's self explanatory:
https://www.youtube.com/watch?v=OBx-QYkj3Bg
This was tried and hated by many top pilots. At that time instrument altitude accuracy was not good enough. It can be now. Instrument manufacturers know how to make accurate enough altitude on the track via GPS and pressure sensor.
A cone slope of 4:1 gives an optimum speed to cone of about 54km/h. 3:1 gives 60km/h.
The other reason is that it is fun to make these final sprints low at the end of the task. And top pilots have developed specific piloting and judgment skills for that. Honorin is one of them and I believe he's the most talented in the world in finding the fastest and lowest way to goal. These guys wish to keep the benefits unless there is a good reason.
But if they are fully informed of all the cost it goes with, they could have a different opinion.
ESS with altitude bonus.
It’s doing the same effect as the CESS in limiting speed to goal but it’s bonus time from altitude. To have the same effect as a cone slope of 3:0, the bonus should be 0.3 s/m.
So someone arriving at the same time as someone else but 10 meters higher will receive 3s bonus, which is 3s less on his task time.
Removing or limiting time points while maximizing leading points and distance points.
To be discussed.
I hope the graph below summarizes the idea well.
In the current ecosystem of rules, pilots and manufacturers are pushed to fly unstable wing.
In a possible new ecosystem of rules (bigger limiter but no more final sprint reward), the best CCC wing will also be the more stable wing.